サーボモータでひと工夫
ターゲット
- ラズベリーパイを始めた方(これから何を作ろうか迷っている方)
- pythonプログラムを学び始めた方
- サーボモータの仕組みを知りたい方
準備
- ラズベリーパイ(Raspberry Pi 3 Model Bを利用)
前提
- ラズベリーパイの初期設定が完了していること
- 自宅のネットワークに接続できる状態であること
- ssh接続でリモート接続できること
- pythonプログラムを行ったことがあること
- サーボモータを持っていること
レベル
- 中
手順
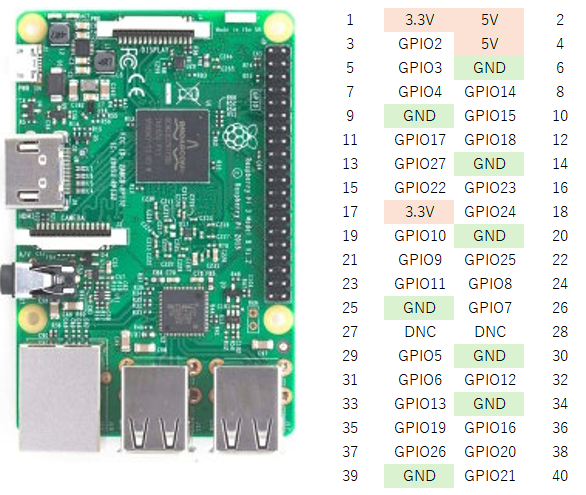
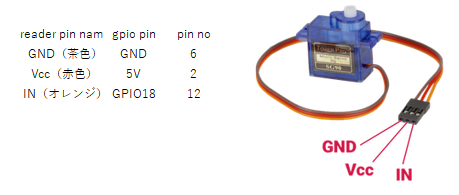
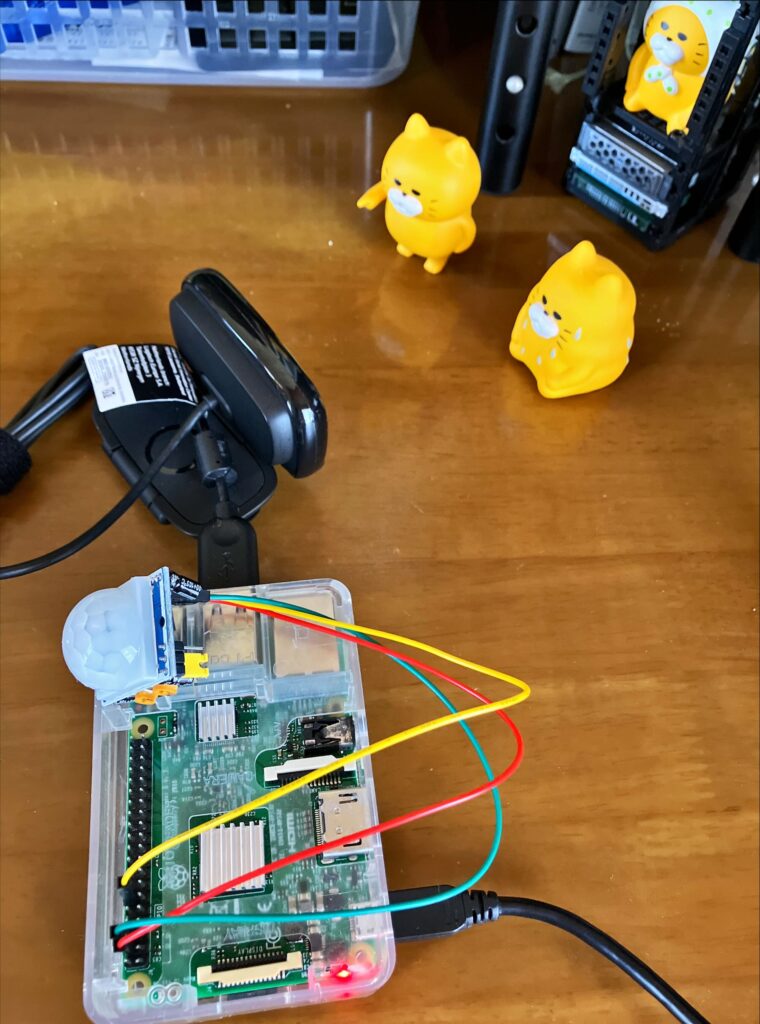
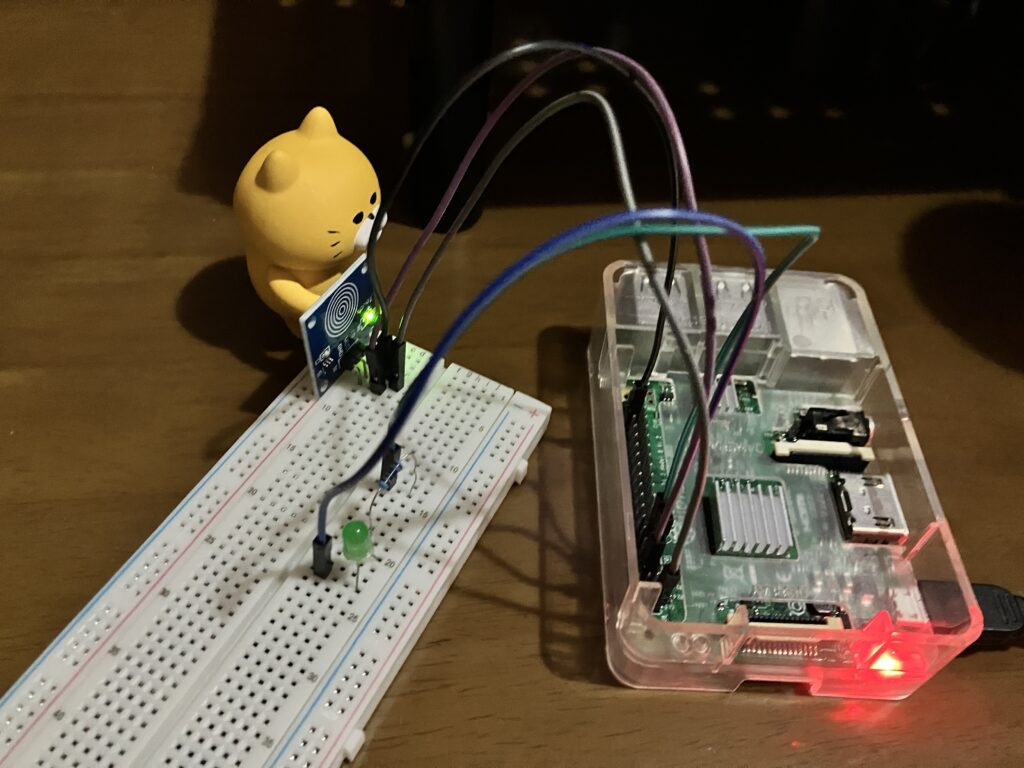
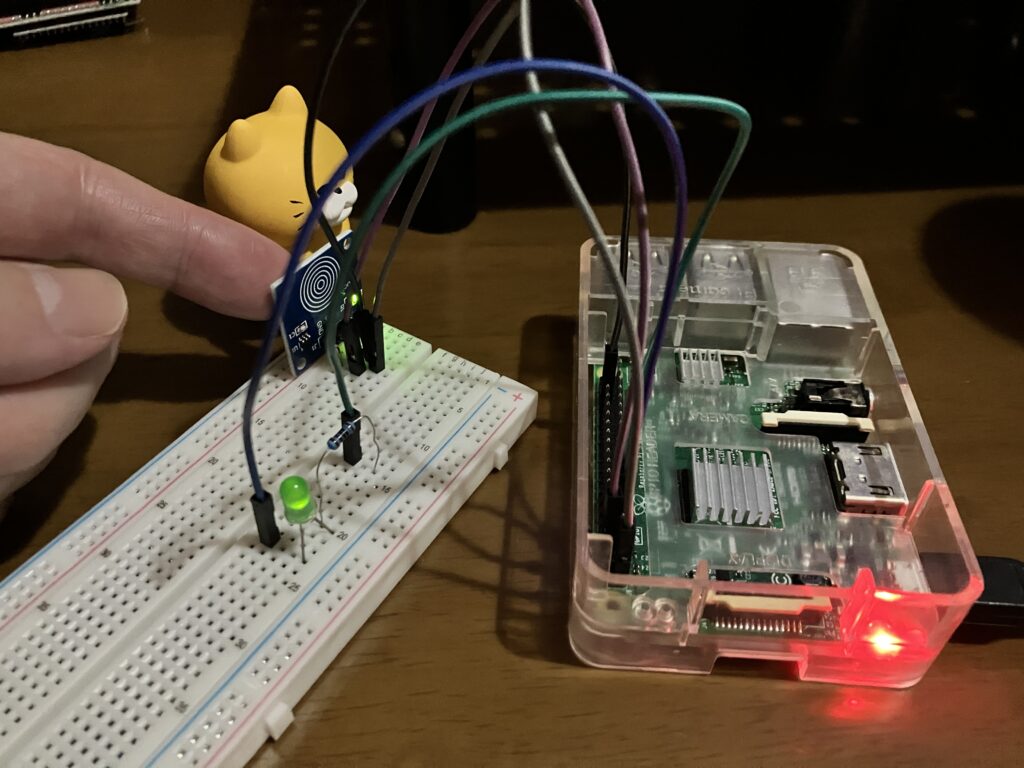
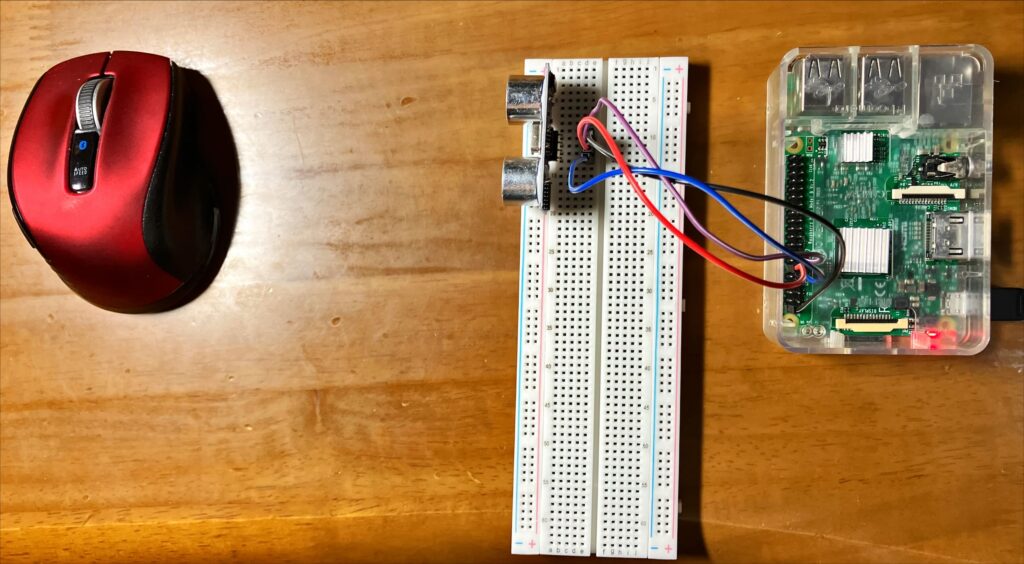
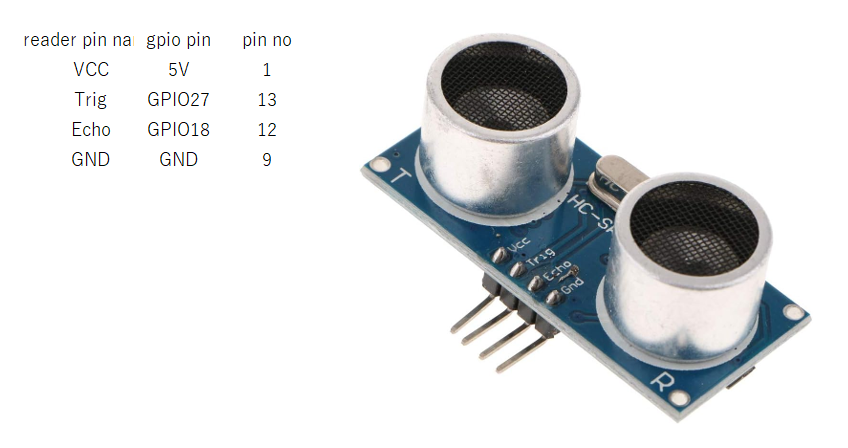
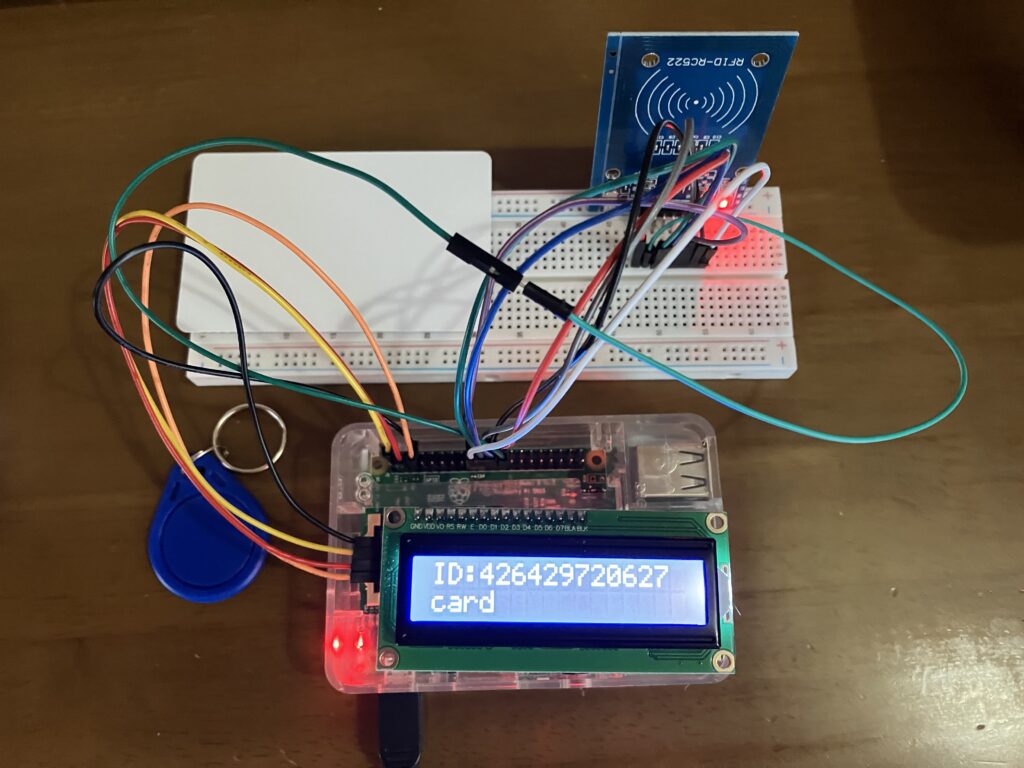
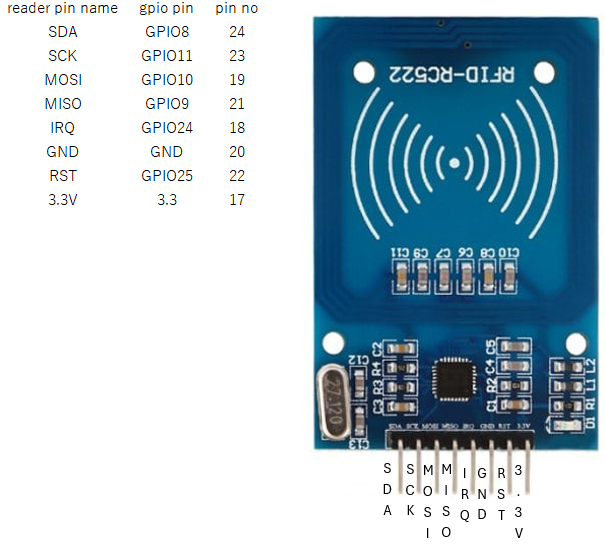
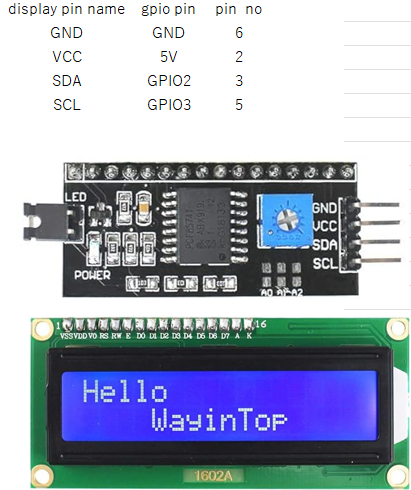
- ラズベリーパイとサーボモータを接続します。
- pigpio のインストールします。
$ sudo apt install -y pigpio python3-pigpio - デーモンを起動・常駐化します。
$ sudo systemctl enable –now pigpio(pigpiod)
$ systemctl status pigpio | grep Active
$ sudo ss -ltnp | grep 8888
0.0.0.0:8888 で pigpiod が LISTEN していればOKです。 - テスト
下記コマンドを入力してテストをしてみてください。
python – <<‘PY’
import pigpio, time, sys
pi = pigpio.pi() # 既定: localhost:8888
pi.set_servo_pulsewidth(18, 1500); time.sleep(1)
pi.set_servo_pulsewidth(18, 1000); time.sleep(1)
pi.set_servo_pulsewidth(18, 2000); time.sleep(1)
pi.set_servo_pulsewidth(18, 0) # 停止
pi.stop()
PY - サーボモータ利用可能です。プログラムは長いので割愛いたします。興味のある方はコメント欄又はお問い合わせよりご連絡ください。